Showing posts from Robotics tag
Measuring Intent in Human-Robot Cooperative Manipulation
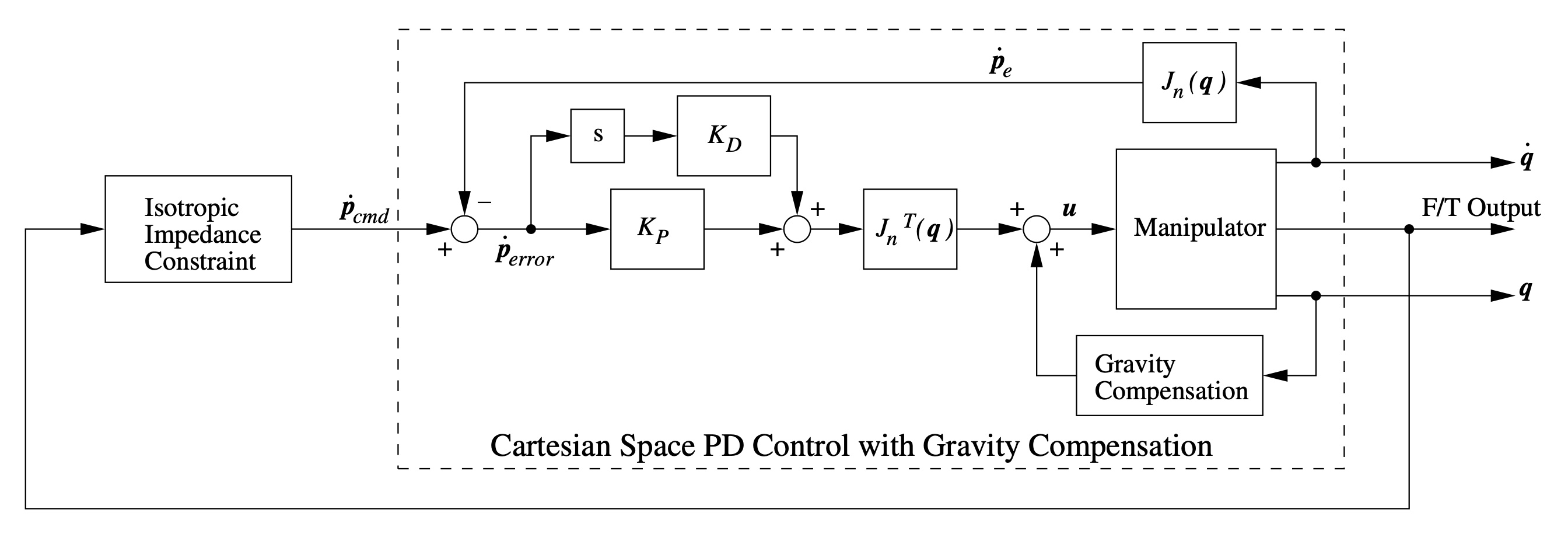
To effectively interact with people in a physically assistive role, robots will need to be able to cooperatively manipulate objects with a human partner. For example, it can be very difficult for an individual to manipulate a long or heavy object. An assistant can help to share the load, and improve the maneuverability of the object. Each partner can communicate objectives (e.g., move around an obstacle or put the object down) via non-verbal cues (e.g., moving the end of the object in a …