Measuring Intent in Human-Robot Cooperative Manipulation
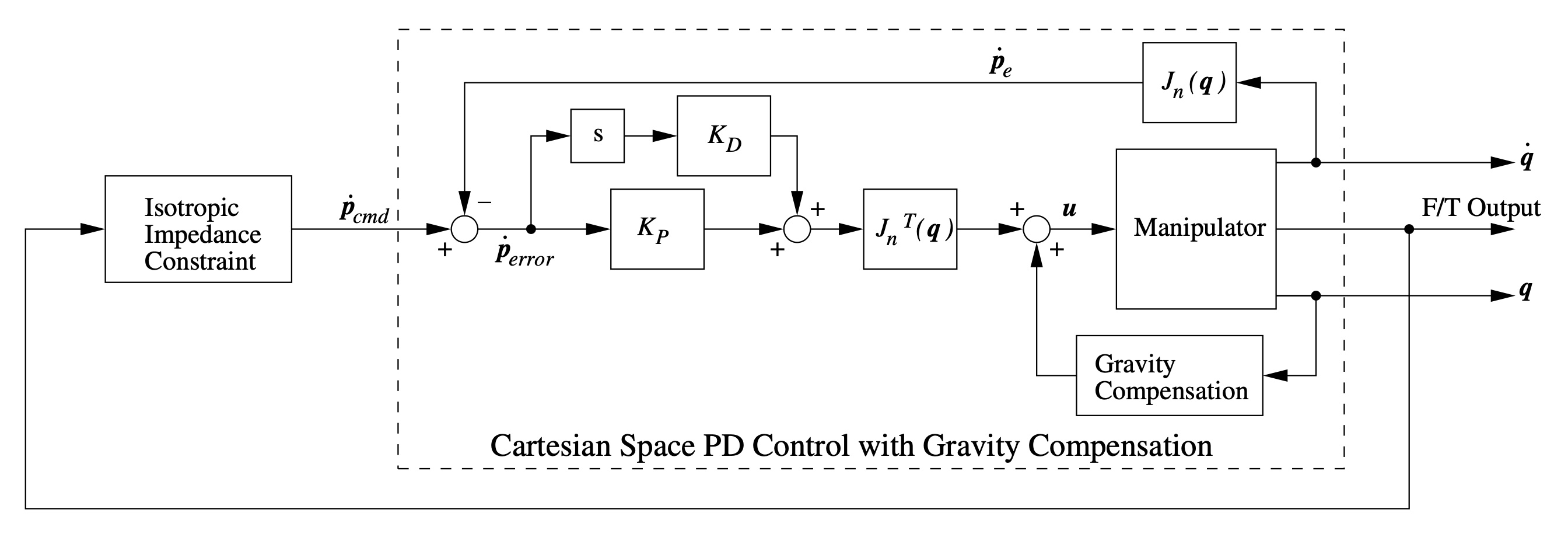
To effectively interact with people in a physically assistive role, robots will need to be able to cooperatively manipulate objects with a human partner. For example, it can be very difficult for an individual to manipulate a long or heavy object. An assistant can help to share the load, and improve the maneuverability of the object. Each partner can communicate objectives (e.g., move around an obstacle or put the object down) via non-verbal cues (e.g., moving the end of the object in a particular direction, changing speed, or tugging). Herein, non-verbal communication in a human-robot coordi- nated manipulation task is addressed using a small articulated robot arm equipped with a 6-axis wrist mounted force/torque sensor and joint angle encoders. The robot controller uses a Jacobian Transpose velocity PD control scheme with gravity compensation. To aid collaborative manipulation we implement a uniform impedance controller at the robot end-effector with an attractive force to a virtual path in the style of a cobot. Unlike a cobot, this path is recomputed online as a function of user input. In our present research, we utilize force/torque sensor measurements to identify intentional user communications specifying a change in the task direction. We consider the impact of path recomputation and the resulting robot haptic feedback on user physiological response.
Check out our paper
Measuring Intent in Human-Robot Cooperative Manipulation
Proceedings of Workshop on Multimodal Human–Robot Interfaces, 2010 IEEE International Conference on Robotics and Automation (ICRA 2010)
Davide De Carli, Evan Hohert, Chris AC Parker, Susana Zoghbi, Simon Leonard, Elizabeth Croft, Antonio Bicchi

You May Also Like

Antler Program T-5days
We are about to start the Antler program in the Nordics in just 5 days and I can’t wait. For the past 6 weeks, we’ve had the pre-ramp phase, where we already started chatting with other founders and Antler coaches, mentors and partners. For those that don’t know, Antler is a 12-week program that helps you meet like-minded founders and work on ideas in a systematic way. At the end of the program, you present your progress to an Investment Committee to see if your startup will …
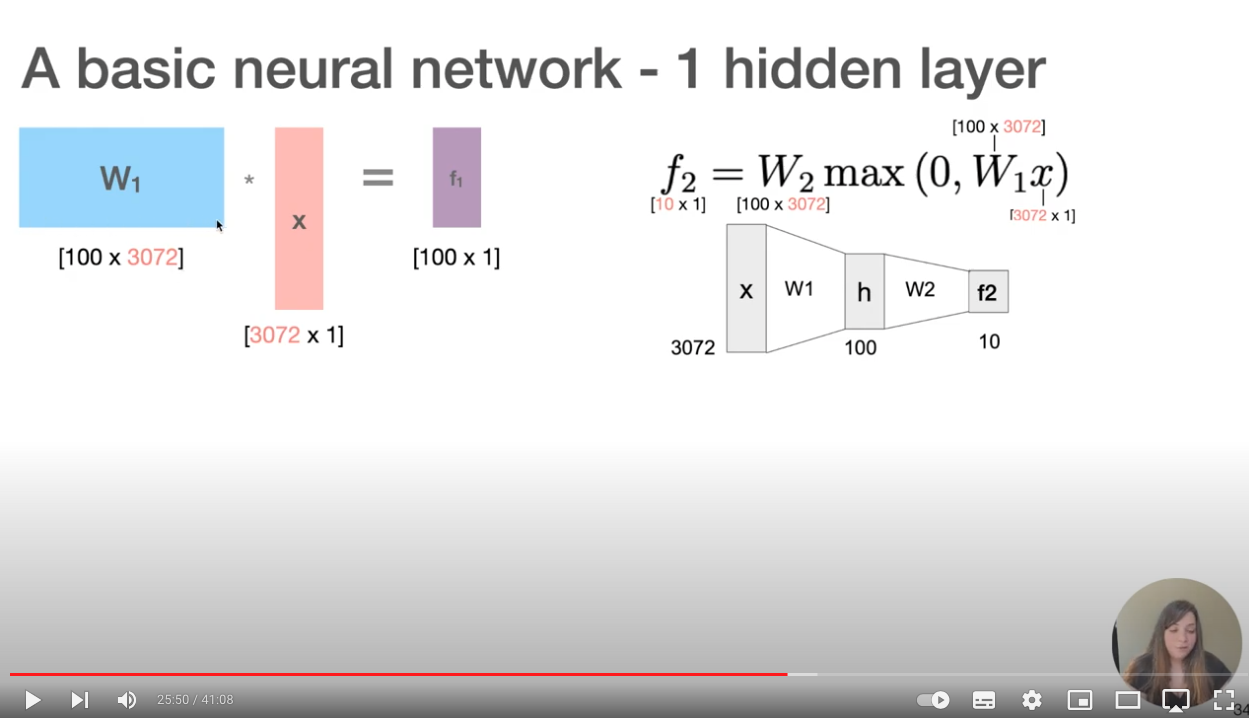
Tutorial: Intro to Deep Learning
In this talk, I give a gentle introduction to the fundamental concepts behind Deep Learning. The underlying concepts are surprisingly simple, but extremely powerful. I hope you enjoy it.
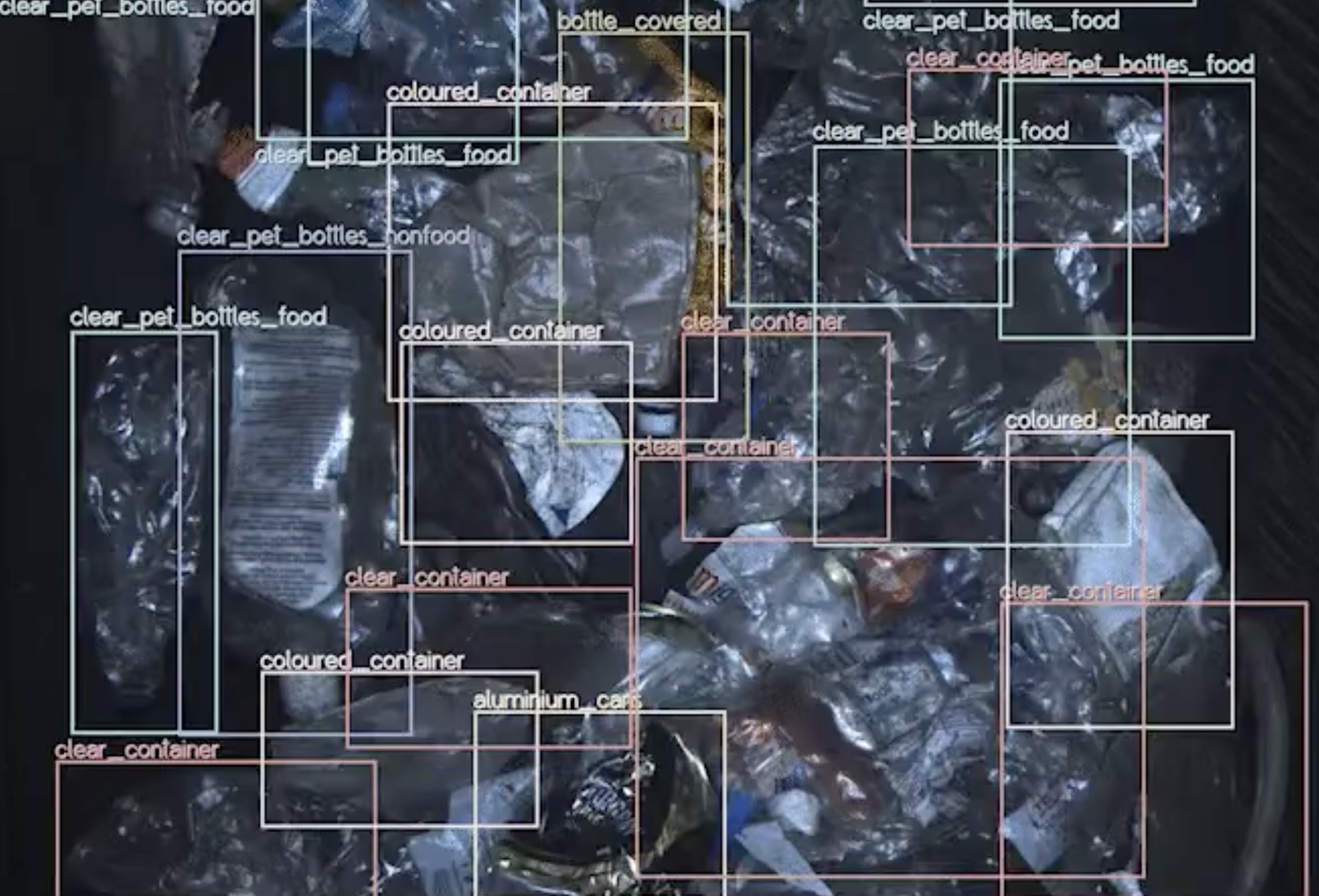
Waste Analytics System for Greyparrot.ai
At Greyparrot.ai, I helped build a world-class waste analytics platform. I led the Deep Learning team to create a system that automatically recognizes all trash items going through recycling facilities, helping recover all valuable materials and converting them to assets. Cameras were installed on top of conveyor belts that transport waste. Our tech accurately recognized around 50 distinct object categories and hundreds of brands, empowering robotic manipulation and data-driven insights. As Head …